All together now: Simultaneous Object Detection and Continuous Pose Estimation using a Hough Forest with Probabilistic Locally Enhanced Voting
Abstract
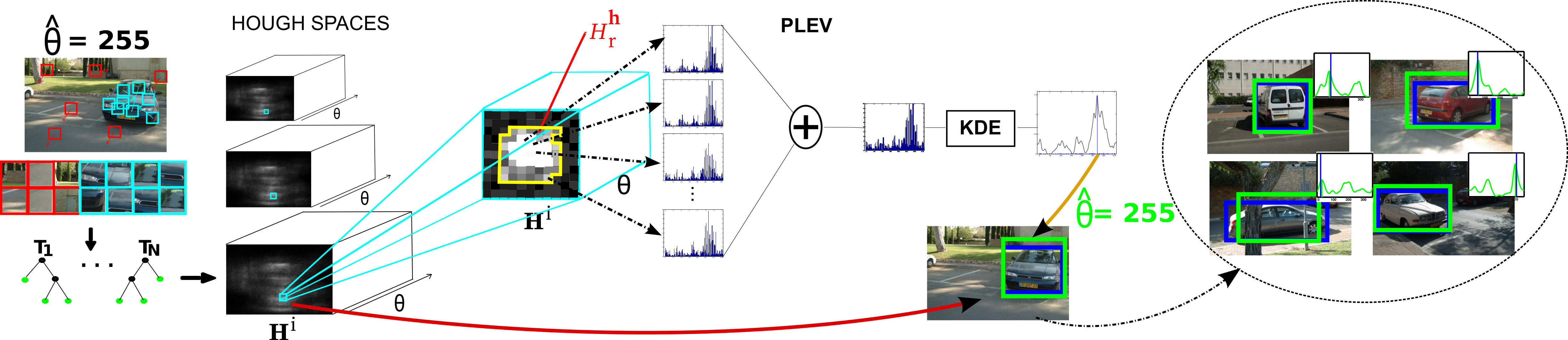
Simultaneous object detection and pose estimation is a challenging task in computer vision. In this paper, we tackle the problem using Hough Forests. Unlike most methods in the literature, we focus on the problem of continuous pose estimation. Moreover, we aim for a probabilistic output. We first introduce a new pose purity criterion for splitting a node during the forest training. Second, we propose the concept of Probabilistic Locally Enhanced Voting (PLEV), a novel regression strategy which consists in modulating the regression with a kernel density estimation to consolidate the votes in a local region near the maxima detected in the Hough space. And third, we propose a pose-based backprojection strategy to improve the bounding box estimation. With these three additions, we show that our Hough Forest can achieve state-of-the-art results without needing 3D CAD models. We present a quite versatile method, showing results for different categories (cars as well as faces) and for different modalities (RGB as well as depth images).
Results
Downloads
Software
- Code + Experimental setup - (544 MB) Last update (06-October-2014)
Paper
All together now: Simultaneous Object Detection and Continuous Pose Estimation using a Hough Forest with Probabilistic Locally Enhanced Voting, C. Redondo-Cabrera, R. J. Lopez-Sastre and T. Tuytelaars. BMVC 2014.
Citing
If you make use of this software, please cite the following reference in any publications:
@INPROCEEDINGS{redondo2014bmvc,
author = {Redondo-Cabrera, C. and Lopez-Sastre, R. and Tuytelaars, T.},
title = {All together now: Simultaneous Object Detection and Continuous Pose Estimation using a Hough Forest with Probabilistic Locally Enhanced Voting},
booktitle = {BMVC},
year = {2014}
}