Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation
Abstract
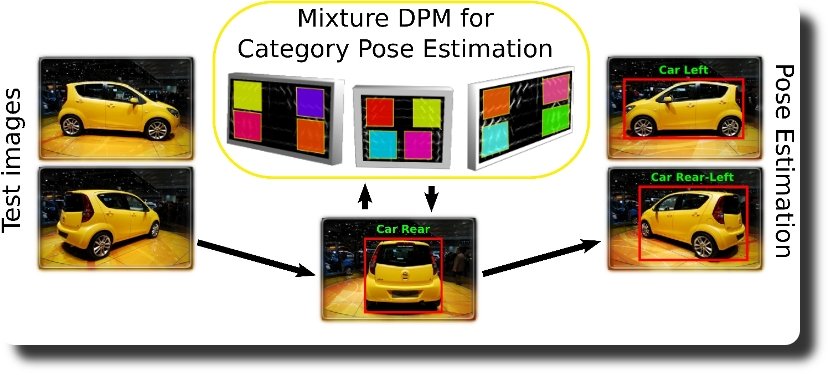
Deformable Part Models (DPMs) as introduced by Felzenszwalb et al. have shown remarkably good results for category-level object detection. In this paper, we explore whether they are also well suited for the related problem of category-level object pose estimation. To this end, we extend the original DPM so as to improve its accuracy in object category pose estimation and design novel and more effective learning strategies. We benchmark the methods using various publicly available data sets. Provided that the training data is sufficiently balanced and clean, our method outperforms the state-of-the-art.
Results
Downloads
Software
- Download a ready-to-use mDPM car pose estimator for 4, 8 a 16 views.
Data
- Download the PASCAL VOC Augmented datasets (2006, 2007 and 2010).
- Download the ICARO dataset.
You may download the paper too:
Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation, R. J. López-Sastre, T. Tuytelaars, S. Savarese. ICCV 2011 - 1st IEEE Workshop on Challenges and Opportunities in Robot Perception. Last update (11-Jan-12) with new results.
Citing
If you make use of this data and software, please cite the following reference in any publications:
@INPROCEEDINGS{lopez2011iccv,
author = {Lopez-Sastre, R.~J. and Tuytelaars, T. and Savarese, S.},
title = {Deformable Part Models Revisited: A Performance Evaluation for Object Category Pose Estimation},
booktitle = {ICCV, 1st IEEE Workshop on Challenges and Opportunities in Robot Perception},
year = {2011}
}