Publications
Rethinking Online Action Detection in Untrimmed Videos: A Novel Online Evaluation Protocol
M. Baptista-Ríos, R. J. López-Sastre, F. Caba Heilbron, Jan van Gemert, F. J. Acevedo-Rodríguez, S. Maldonado-Bascón.
IEEE Access, 2020. ![]() Code
Code
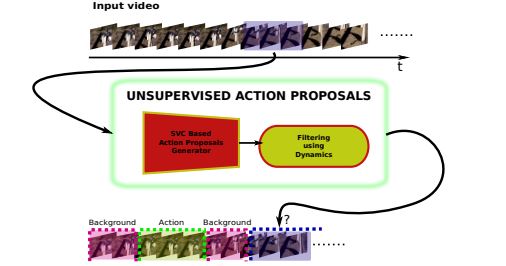
Unsupervised Action Proposals Using Support Vector Classifiers for Online Video Processing
M. Baptista-Ríos, R. J. López-Sastre, F. J. Acevedo-Rodríguez, P. Martín-Martín, S. Maldonado-Bascón.
Sensors, 2020. ![]() Code
Code
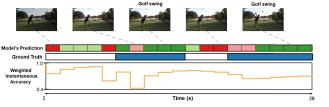
The Instantaneous Accuracy: a Novel Metric for the Problem of Online Human Behaviour Recognition in Untrimmed Videos
M. Baptista-Ríos, R. J. López-Sastre, F. Caba Heilbron, Jan van Gemert, F. J. Acevedo-Rodríguez, S. Maldonado-Bascón.
10th International Workshop on Human Bevaviour Undertstanding, ICCV, 2019. ![]() Code
Code

Fallen People Detection Capabilities Using Assistive Robot
S. Maldonado-Bascón, C. Iglesias-Iglesias, P. Martín-Martín, S. Lafuente-Arroyo.
Electronics, 2019. ![]() Data
Data

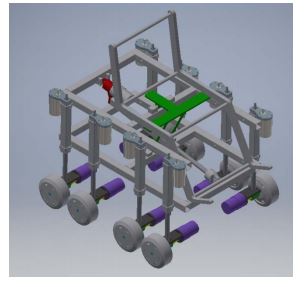
A Novel Approach for a Leg-Based Stair-Climbing Wheelchair based on Electrical Linear Actuators
E. Pereira, H. Gómez-Moreno, C. Alen-Cordero, P. Gil-Jiménez, S. Maldonado-Bascón.
ICINCO, 2019. ![]()
Segmentation in Corridor Environments: Combining floor and ceiling detection
S. Lafuente-Arroyo, S. Maldonado-Bascón, H. Gómez-Moreno, C. Alen-Cordero.
IBPRIA, 2019. ![]()

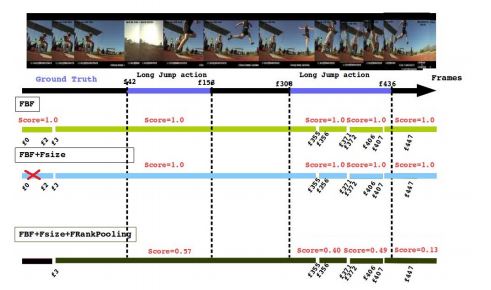
Combining Online Clustering and Rank Pooling Dynamics for Action Proposals
Nadjia Khatir, Roberto J. López-Sastre, Marcos Baptista-Ríos, Safia Nait-Bahloul, Francisco Javier Acevedo-Rodríguez.
IBPRIA, 2019 ![]()
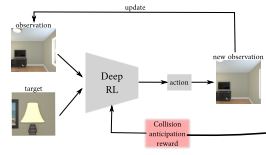
Collision anticipation via deep reinforcement learning for visual navigation
E. Gutiérrez-Maestro, R. J. López-Sastre, S. Maldonado-Bascón.
IBPRIA, 2019 ![]()
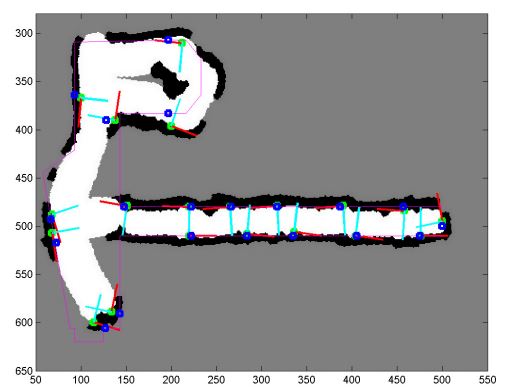
On-Board Correction of Systematic Odometry Errors in Differential Robots
S. Maldonado-Bascón, R. J. López-Sastre, F. J. Acevedo-Rodríguez, P. Gil-Jiménez.
Journal of Sensors, 2019. ![]() Data
Data

Learning to Exploit the Prior Network Knowledge for Weakly-Supervised Semantic Segmentation
C. Redondo-Cabrera, M. Baptista-Ríos, R. J. López-Sastre.
IEEE Transactions on Image Processing, 2019 ![]() Code
Code
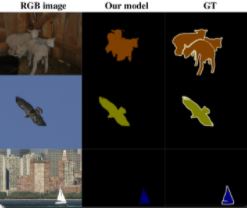
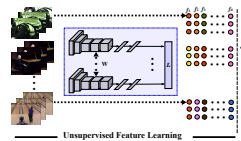
Unsupervised learning from videos using temporal coherency deep networks
C. Redondo-Cabrera and R. J. López-Sastre.
Computer Vision and Image Understanding, 2019. ![]() Code
Code
Embarrassingly Simple Model for Early Action Proposal
M. Baptista-Ríos, R. J. López-Sastre, F. J. Acevedo-Rodríguez, S. Maldonado-Bascón.
Anticipating Human Behavior Workshop, ECCV, 2018. ![]()
The challenge of simultaneous object detection and pose estimation: a comparative study
D. Oñoro-Rubio, R. J. López-Sastre, C. Redondo-Cabrera, P. Gil-Jiménez.
Image and Vision Computing, 2018. ![]() Code
Code

In pixels we trust: From Pixel Labeling to Object Localization and Scene Categorization
C. Herránz-Perdigureo, C. Redondo-Cabrera and R. J. López-Sastre.

Low cost robot for indoor cognitive disorder people orientation
S. Maldonado-Bascón, F.J. Acevedo-Rodríguez F. Montoya-Andugar and P. Gil-Jiménez.
International Conference on Industrial Technology, 2018. ![]()